Nun, was soll man zu diesem Projekt schon sagen? Es ist wie beim LMF auch, eine verrückte Idee bzw. Aussage gewesen, welche seither unsere Köpfe unaufhörlich rauchen lässt.
Ich (Tomi) brauche ein Gerät, mit dem ich meinen Nachwuchs ziehen kann!
Aber es muss mit Allrad sein!
Diese beiden Grundaussagen hatten es in sich. Denn was zunächst sehr einfach umzusetzen scheint, ist tatsächlich alles andere als einfach.
Denn es wird nicht nur ein Bike, sondern auch ein passender Anhänger gebaut. Der Hänger wird einspurig, erhält eine Schwinge um die Ladung von Fahrbahnstößen zu entlasten und soll eine automatische Beleuchtung erhalten, welche beim An – bzw. Abkoppeln automatisch aktiviert/deaktiviert wird.
Das Thema Allrad soll natürlich elektrisch gelöst werden. Aber HALT! Zwei Motoren? Dann braucht man doch zwei Steuerungen, zwei Display und sogar zwei Akkus – oder?
Nun, theoretisch ja. Praktisch jedoch wollen wir es nicht. Das System soll über einen zentralen Akku gespeist und mit einer Steuerung kontrolliert werden. Ein Display und ein Trittbewegungssensor.
Die Entstehung
Aktuell befinden wir uns noch mitten in der Entstehung. Da dies, wie alle anderen Projekt auch, absolut einzigartig ist und seinesgleichen sucht, dauert es natürlich ein wenig und wir müssen viel tüfteln, entwickeln und probieren.
Nebst dem Allradantrieb, der automatischen Beleuchtung des Anhängers oder der Federung, ist die Bremsanlage eines der markantesten technischen Raffinessen. Wir machten uns viele Gedanken darüber, wie man ein so schweres Gespann in einer Notsituation ordentlich und sicher zum stehen bekommt. Mit handelsüblichen Bremsen war das nicht machbar – so viel war klar.
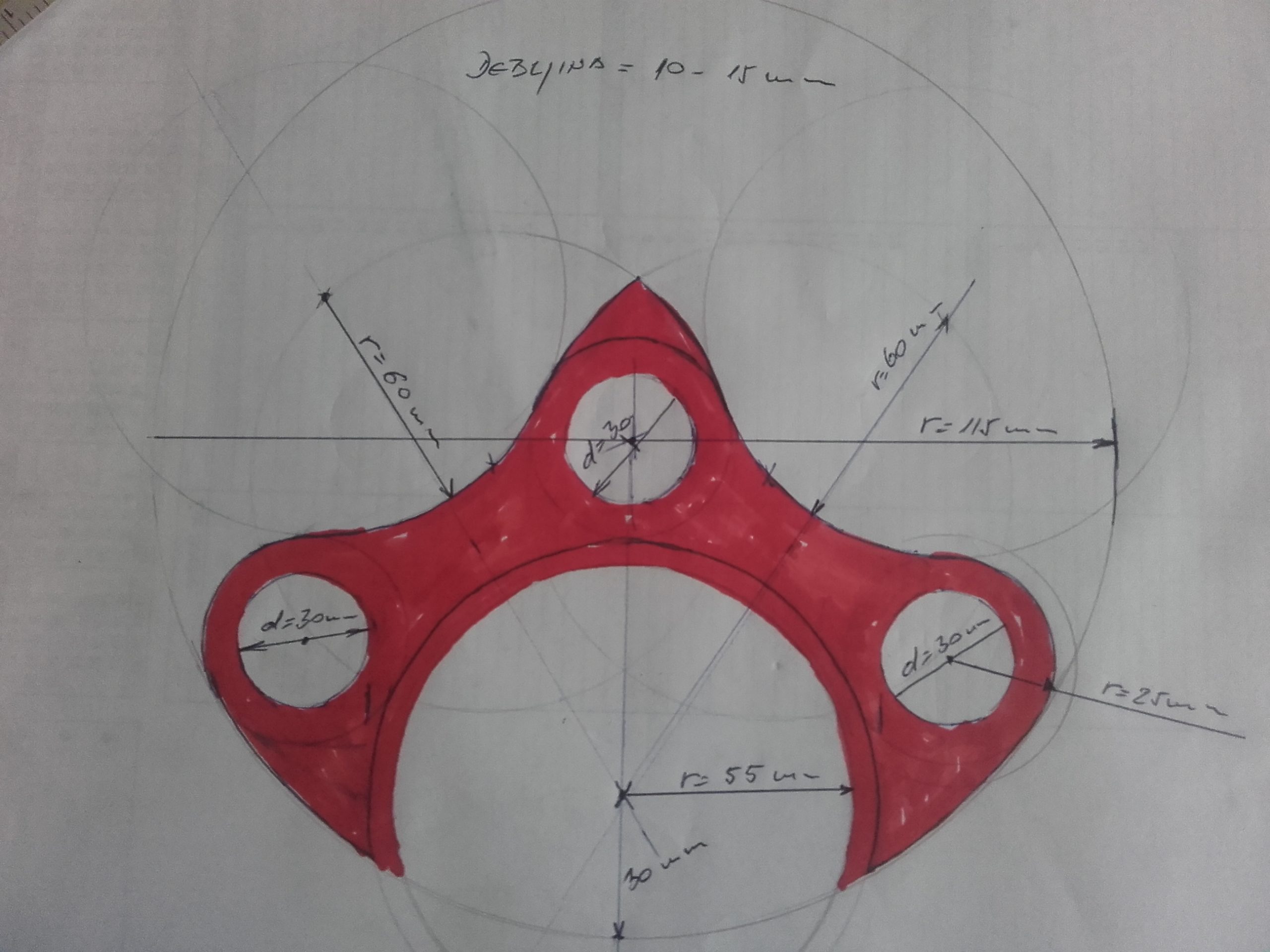
Daher kommen bei diesem Bike insgesamt vier Bremsen zum Einsatz. Jeweils zwei werden zusammen über einen Bremshebel angesteuert und wirken auf Vorder- bzw. Hinterrad. Und da man ja bekanntlich auf handelsüblichen Naben keine zwei Bremsscheiben befestigen kann, setzten wir neben den Bremsen noch einen drauf: Die Bremsscheiben werden auf den Felgenringen montiert – zwei pro Felge um genau zu sein.
Der Controller, welcher beide Motoren gleichzeitig und gleichmäßig steuern wird, ist ein absoluter Prototyp und Einzelstück. Er synchronisiert nicht nur stets beide Drehzahlen der Motoren, sondern auch deren ausgegebene Leistung. In Summe geben beide Motoren immer 250W Nennleistung ab. Bei Bedarf wird die Leistung pro Motor entsprechend verteilt – so erhält der Heckmotor z.B. bei Steigungen ca. 70% und der Frontmotor 30%. Diese Verteilung variiert auch in Abhängigkeit der Steigung, denn der Controller hat auch einen Neigungssensor.
Bei Beschleunigung aus dem Stand bedeutet es auch: „2x500W Spitzenleistung bitte“. Man will ja auch vorwärts kommen 🙂 Abgerundet wird das Ganze mit der Option, den Controller via Bluetooth mit dem Handy zu koppeln, und diverse Feineinstellungen via Smartphone vorzunehmen oder sogar die E-Daten in die Navigation einzubeziehen.
Zurück
Weiter
Was ist noch offen?
Aktuell sind wir an folgenden Punkten dran:
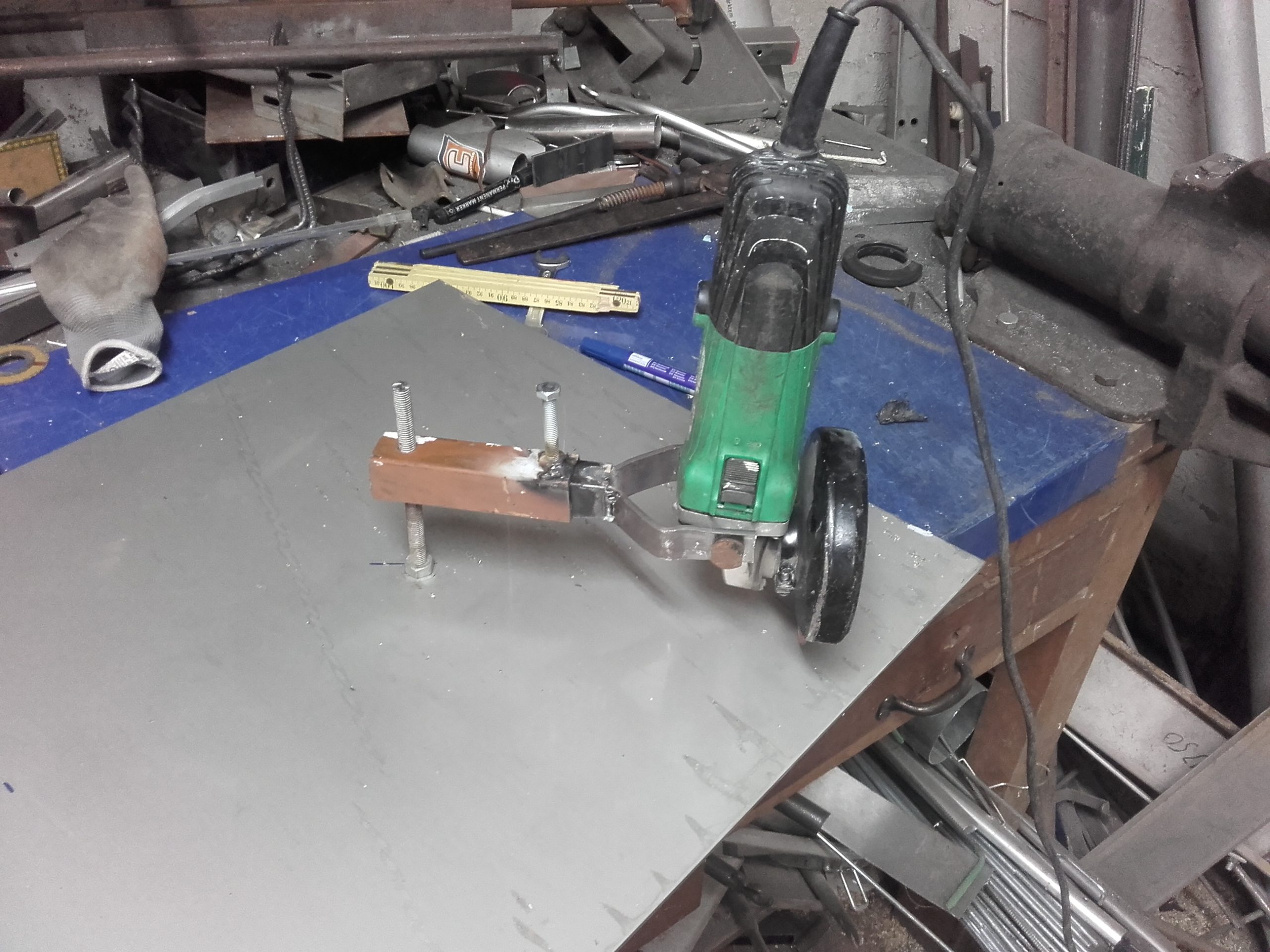
Bremsscheiben zentrieren und abschleifen
Laufräder final Einspeichen
Verkabelung in den Rahmen legen
Federung des Anhängers fertig schweißen
Zudem sind noch folgende Komponenten nicht final definiert und müssen noch besorgt werden:
Reifen, Schläuche, Pannenschutzband
Lenker, Griffe, Vorbau, Klingel
Sattel, Sattelstütze, Sattelklemme
Scheinwerfer & Rücklichter
Kurbeln, Pedale, Tretlager,
Ständer
Insgesamt liegt also noch viel Arbeit vor uns. Ob es in 2017 fertig wird, bleibt abzuwarten.